Fenrir Project Overview
![]()
The Fenrir Project is an open-source, multi-purpose educational robot designed for a wide range of applications in high schools and universities.
The robot is based on Raspberry Pi 4 and Arduino Nano. The Raspberry Pi provides computational power, ROS2 support, WiFi connection and USB support. The Arduino Nano extends the Raspberry Pi IOs and manages peripherals.
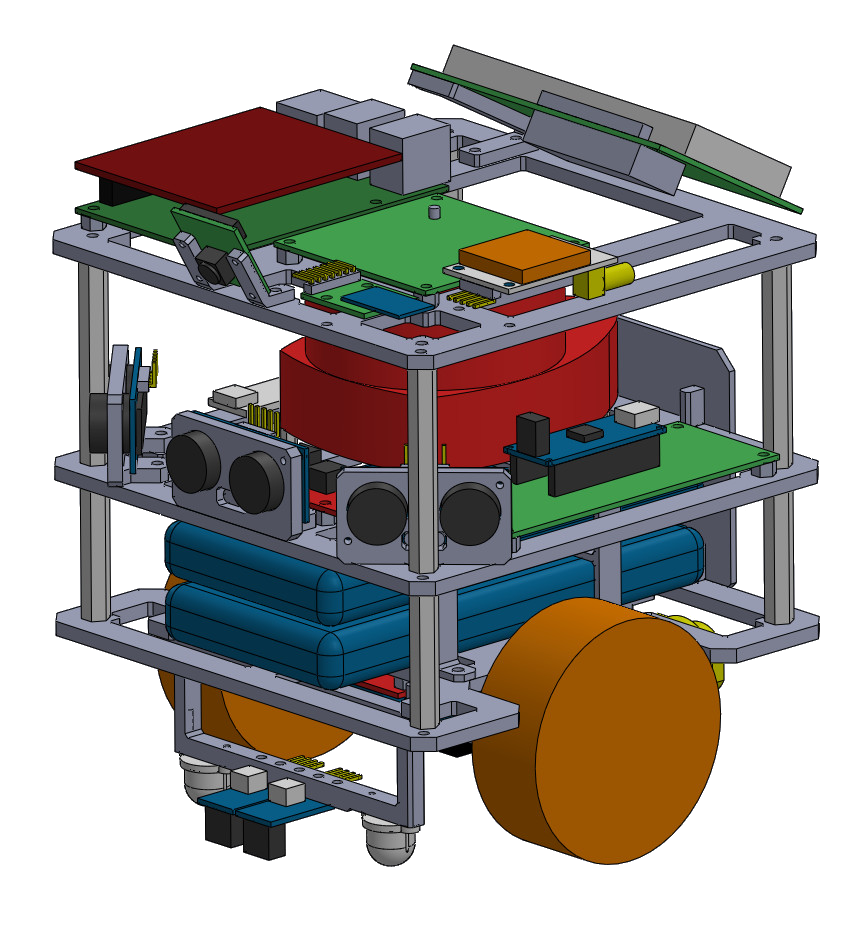
Robot Overview
Visualization - Physical Design
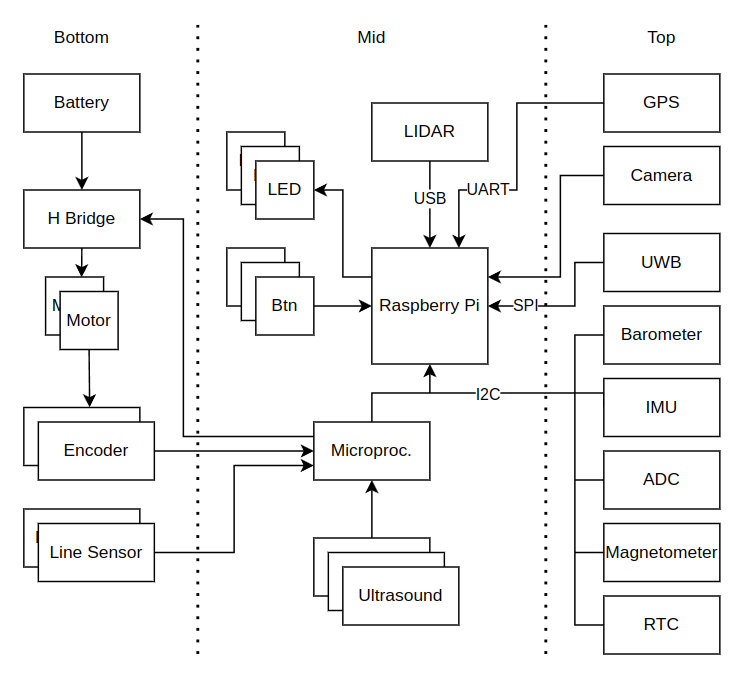
Schematic system Architecture
Acknowledgments
This work was created with the support of project RP182401001 under the PPSŘ 2025 program.