Readme
This documentation contains weekly assignments for the MPC-MAP course, as well as the semester project assignment and a brief description of the simulation tool.
Please note that this documentation is continuously updated. The final version of each assignment will be available at the given week. The same applies to the semester project—the assignment will be introduced by a lecturer during the semester.
Week 2 - Uncertainty
The goal of this assignment is to become familiar with the simulator and explore uncertainties in the sensors and motion.
Task 1 – The simulator
Download the repository containig the simulator from GitHub https://github.com/Robotics-BUT/MPC-MAP-Student, and become familiar with it (see the Simulator section).
- Explore the
private_vars,read_only_vars, andpublic_varsdata structures. - Become familiar with the sequence of the operations in the infinite simulation loop in
main.mandalgorithms/student_workspace.m. - Load different maps via
algorithms/setup.mand set different start positions. - Try various motion commands in
algorithms/motion_control/plan_motion.mand observe the robot’s behaviour.
No output is required in this step.
Task 2 – Sensor uncertainty
The robot is equipped with an 8-way LiDAR and a GNSS receiver. Determine the standard deviation (std) sigma for the data from both sensors by placing the robot in a static position (zero velocities) in suitable maps and collecting data for at least 100 simulation periods. Discuss whether the std is consistent across individual LiDAR channels and both GNSS axes. Plot histograms of the measurements.
Task 3 – Covariance matrix
Use the measurements from the previous step and MATLAB’s internal cov function to assemble the covariance matrix for both sensors. Verify that the resultant matrix is of size 8×8 for the LiDAR and 2×2 for the GNSS. Ensure that the values on the main diagonal are equal to sigma^2, i.e., variance=std^2`.
Task 4 – Normal distribution
Create a function norm_pdf to assemble the probability density function (pdf) of the normal distribution. The function should accept three arguments: x (values at which to evaluate the pdf), mu (mean), and sigma (standard deviation). Utilize this function along with the sigma values from Task 2 (e.g., for the 1st LiDAR channel and the X GNSS axis) to generate two pdf illustrating the noise characteristics of the robot’s sensors, and plot them in a single image (use mu=0 in both cases).
Task 5 – Motion uncertainty
Uncertainty exists not only in the measurements (sensor data) but also in the motion. Load the indoor_1 map and attempt to navigate the robot to the goal location without using sensors. To achieve this, apply an appropriate sequence of motion commands inside the plan_motion.m function. Save a screenshot of a successful run and discuss the potential sources of uncertainty in the robot’s motion.
Submission
To implement the tasks, use only the algorithms directory; do not modify the rest of the simulator. The solution must run without errors in a fresh instance of the simulator and must generate the graphical outputs included in the report.
Create a single A4 report to the provided template that briefly describes your solution, with a few sentences for each task and an image where applicable.
Send the link to your GitHub repository to the lecturer’s email by Monday at 23:59 next week. The repository must contain the unmodified simulator, including the algorithms directory with your solution. Include your report in the report directory. To ensure easy identification, please tag the final version with the week_2 tag, or include your solution in a branch named week_2.
Week 3 - Motion control
This week, implement a simple path-following algorithm using motion capture-based localization data.
Task 1 – Creating maps
Look into examples located in the maps folder and identify meaning of individual parameters by means of the reverse engineering. Then, create an arbitrary custom map containing at least one wall. The map is going to be used to test your motion control algorithm so make it rather spacious. You need to define a GNSS-denied region to simulate indoor environment where the motion capture works.
Task 2 – Sample paths
Define at least three test paths of different kind, for example:
- straight line,
- circular arc,
- sine wave.
A path is defined as a sequence of (x, y) waypoints. Note that waypoints stored in the public_vars.path variable are visualized by the simulator. Utilization of this variable is recommended.
Task 3 – Motion control
Choose any path-following algorithm and implement it to make the robot follow the paths defined in the previous task. Use the variable read_only_vars.mocap_pose to get nearly true pose of the robot. Play with parameters of the chosen method and discuss how they affect the quality of the motion control.
Put your solution to the plan_motion function. By default, the code structure is prepared for target point-based algorithms; you are, however, free to alter the function and use, e.g., the cross track error instead. The choice depends on your preferences, you can even implement multiple algorithms and compare them.
Mind the fact that the MoCap data will not be available for the final project!
Submission
To implement the tasks, use only the algorithms directory; do not modify the rest of the simulator. The solution must run without errors in a fresh instance of the simulator and must generate the graphical outputs included in the report.
Create a single A4 report to the provided template that briefly describes your solution, with a few sentences for each task and an image where applicable.
Send the link to your GitHub repository to the lecturer’s email by Monday at 23:59 next week. The repository must contain the unmodified simulator, including the algorithms directory with your solution (and in this case, your custom map too). Include your report in the report directory. To ensure easy identification, please tag the final version with the week_3 tag, or include your solution in a branch named week_3.
Week 4 - Particle Filter
The goal of this assignment is to implement a working localization algorithm based on the particle filter. Your submitted solution should be able to demonstrate particle convergence around the robot.
Task 1 – Prediction
Implement the prediction function predict_pose that takes the particle pose and the control input as arguments and returns the new pose. Apply a probabilistic motion model to enhance particles variance.
Task 2 – Correction
Implement the measurement function compute_lidar_measurement that takes the map, the particle pose, and the lidar orientations as arguments and returns a vector of measured distances without any noise.
You may take advantage of the simulator function ray_cast which is used as follows:
intersections = ray_cast(ray_origin, walls, direction)
The first argument is a position of the ray’s initial point, the second argument is the description of walls stored in read_only_vars.map.walls, and the final argument is a direction of the ray in radians. The function returns all intersection of the given ray with the walls.
Tip: You can use the MoCap pose and lidar measurements to verify that your function returns correct data.
Then, implement the weighting function weight_particles. You may use arbitrary metric meeting the requirements.
Task 3 – Resampling
Implement the resampling function resample_particles, taking a set of particles and their associated weights as arguments and returning a new set of resampled particles. Use any algorithm of your choice.
Task 4 – Localization
Initialize a set of particles at random poses within any indoor map. Update the particle filter in each iteration (perform prediction, correction and resampling). Adjust the previously implemented functions to make the particles converge to the robot’s true pose. You should be able to present a screenshot with a cluster of particles gathered around the agent. You may need to move the robot in some cases to make the localization work.
Tip: Begin in a map with distinctive features, i.e. not containing similar corridors etc. You can create your own map to help you with the task.
Discuss the most important parameters of your solution and justify the selection of algorithms. What was the major issue you have had to overcome?
Submission
To implement the tasks, use only the algorithms directory; do not modify the rest of the simulator. The solution must run without errors in a fresh instance of the simulator and must generate the graphical outputs included in the report.
Create a single A4 report to the provided template that briefly describes your solution, with a few sentences for each task and an image where applicable.
Send the link to your GitHub repository to the lecturer’s email by Monday at 23:59 next week. The repository must contain the unmodified simulator, including the algorithms directory with your solution. Include your report in the report directory. To ensure easy identification, please tag the final version with the week_4 tag, or include your solution in a branch named week_4.
Week 5 - Kalman Filter and EKF
The goal of this assignment is to implement a localization algorithm based on the Extended Kalman Filter and GNSS data.
Task 1 – Preparation
Load the outdoor_1 map and manually design a trajectory between the start pose [2,2,π/2] and the goal location [16,2].
Examine the uncertainty of the GNSS measurement; i.e. implement an initialization procedure which will determine the initial position (mean) and the covariance matrix of the GNSS sensor data. You will need the data within later tasks.
Task 2 – EKF implementation
As you use a differential wheeled robot, there is a nonlinearity in the state and control transition (nonlinear function g(x)); thus, you must employ the EKF for the prediction step. Implement ekf_predict function for given drive type.
On the other hand, the KF is appropriate for the correction phase, since there is a linear relation between the state and measurement. Implement kf_correct function.
Task 3 – Filter tuning with a known initial pose
Set the initial pose to x=[2,2,π/2]. Use this pose and Σ with zeros (i.e., high certainty) as the initial belief for the EKF algorithm, and navigate the robot along your trajectory to the goal location. Only the EKF-based estimated pose can be utilized for the control. You already know the GNSS covariance matrix to assemble the Q matrix (measurement noise covariance); for the process noise, apply variances 0.01 (a rough initial estimate) to all variables and tune the R matrix to reach an optimal performance. Capture the result.
Task 4 – Algorithm deployment
In practice, the true initial pose is not know for the algorithm. Utilize your initialization procedure from the Task 1 to determine the initial belief for the EKF. Notice that you can not measure the robot orientation, therefore a high variance must be specified for this variable within the initial belief.
Observe, how the estimated pose converges to the real pose values, and eventually tune the filter parameters to reach an optimal performance (a “smooth” estimate). Notice the orientation is successfully estimated even it is not directly measured. Capture a successful ride to the goal location.
Submission
To implement the tasks, use only the algorithms directory; do not modify the rest of the simulator. The solution must run without errors in a fresh instance of the simulator and must generate the graphical outputs included in the report.
Create a single A4 report to the provided template that briefly describes your solution, with a few sentences for each task and an image where applicable.
Send the link to your GitHub repository to the lecturer’s email by Monday at 23:59 next week. The repository must contain the unmodified simulator, including the algorithms directory with your solution. Include your report in the report directory. To ensure easy identification, please tag the final version with the week_5 tag, or include your solution in a branch named week_5.
Week 6 - Path Planning
The goal of this assignment is to implement a working path planning algorithm. Your submitted solution should be able to plan a path between any starting and goal position (if a solution exists).
Task 1
Choose and implement an algorithm which finds a path between the starting position of the robot and the goal position in the map. The path must not collide with any wall. Use the occupancy grid stored in the variable read_only_vars.discrete_map.map.
Task 2
Adjust the planning algorithm to keep a clearance from obstacles. You may use any method. The clearance needs to be at least 0.2 m.
Task 3
Apply a smoothing algorithm to the generated paths. Use the iterative algorithm provided in the lecture or find another viable method. Discuss the effects of the algorithm’s parameters.
Submission
Send the link to your GitHub repository to the lecturer’s email by Monday at 23:59 next week. The repository must contain the unmodified simulator, including the algorithms directory with your solution. Include your report in the report directory. To ensure easy identification, please tag the final version with the week_6 tag, or include your solution in a branch named week_6.
Semester Project
Project objectives
The primary objective of the semester project is to develop a viable solution for the provided MATLAB simulator. Your code should guide the robot to its goal in the fewest possible iterations. The algorithms should be capable of working across various map types, and accommodate arbitrary goal and starting positions, including orientation. It is imperative that the robot avoids collisions with obstacles and remains within the boundaries of the map.
Successful completion of the project requires the ability to accomplish the task in all sample maps provided in the maps folder. While suitable methods have been covered in lectures and assignments, you are not required to utilize every presented procedure. You are permitted to modify files within the algorithms folder and add your own functions; however, altering the main.m script is strictly prohibited. Note that step 7 of the simulator’s main loop will be disabled, rendering MoCap data unavailable.
Simulator
The simulator is accessible in the repository https://github.com/Robotics-BUT/MPC-MAP-Student. Do not modify any functions relied upon by the simulator; your solution will be evaluated using the functions published in the repository.
Your code must be executable without dependence on any MATLAB toolbox.
The solution will be assessed using MATLAB R2023b. The project must yield no errors upon execution.
Tip: Clone a ‘clean’ copy of the simulator from the repository and utilize a toolbox-free installation of MATLAB to ensure that your project encounters no issues.
Assessment
The project will undergo testing by the lecturers using various maps and randomly selected coordinates for the start and goal positions (including orientation). The success rate of reaching the goal and the required number of iterations will be statistically evaluated through repeated execution of the code.
Submission
The deadline is Monday, 18 May 2026, 23:59.
Use the project tag or branch to ensure easy identification of your solution, and send an e-mail to tomas.lazna@ceitec.vutbr.cz informing that your project is finished.
Scoring system
- Success rate of reaching the goal: up to 15 points
- The required number of iterations: up to 15 points
- Technical quality: up to 20 points
To successfully pass the course, a minimum of 20 points must be obtained from the semester project.
MATLAB Robot Simulator
The simulator is lightweight, MATLAB-based tool for testing key algorithms utilized for autonomous navigation in mobile robotics. Basically, it integrates differential drive mobile robot model equipped with two different sensors (lidar and GNSS), and enables to deploy it within custom 2D maps. The main goal is to navigate the robot from start to goal position; for this reason, several algorithms must be implemented:
- Localization: two algorithms are needed - for outddor and indoor. The pose may be estimated via Extended Kalman Filter and GNSS data in outdoor areas; for indoor, the algorithm utilizing Particle Filter and known map is more suitable since there is a GNSS denied zone indoor.
- Path planning: an algorithm to find optimal, obstacle-free path from the start to goal location (e.g. A* and Dijkstra’s algorithms).
- Motion control: a control strategy to follow the computed path by using the actual estimated pose. This results in the control commands for the individual wheels.
The simulator has been tested in MATLAB R2023b; it may not work correctly in other versions.
Variables
The simulator uses numerous variables to provide its function; however, not all of them can be used/red to solve the task (the robot’s true position, for example). The variables are divided into three groups (structures):
- Private variables (
private_vars): these variables are used in the main script only and not accessible in modifiable student functions. - Read only variables (
read_only_vars): these are accessible for your code, but not returned to the main script. - Public variables (
public_vars): feel free to use and modify these variables and add new items to the structure. The majority of student functions return the structure to the main script so you can use it to share variables between the functions.
Except these variable structures, other variables can occur in your workspace, there is no limit to their use.
Simulation Loop
The simulator workspace comprise main script stored in main.m, which contains the main simulator logic/loop and is used to run the simulation (F5 key). After the initialization part (you are expected to modify the setup.m file called in the beginning), there is a while true infinity simulation loop with the following components:
- Check goal: check if goal has been reached.
- Check collision: check whether the robot has not hit the wall.
- Check presence: check whether the robot has not left the arena.
- Check particles: check the particle limit.
- Lidar measurement: read the lidar data and save them into the
read_only_varsstructure. - GNSS measurement: read the GNSS data and save them into the
read_only_varsstructure. - MoCap measurement: read the reference pose from a motion capture system and save it into the
read_only_varsstructure. - Initialization procedure: by default, it is called in the first iteration only; used to init filters and other tasks performed only once.
- Update particle filter: modifies the set of particles used in your particle filter algorithm.
- Update Kalman filter: modifies the mean and variance used in your Kalman filter algorithm.
- Estimate pose: use the filters outputs to acquire the estimate.
- Path planning: returns the result of your path planning algorithm.
- Plan motion: returns the result of your motion control algorithm. Save the result into the
motion_vectorvariable ([v_right, v_left]). - Move robot: physically moves the robot according the
motion_vectorcontrol variable. - GUI rendering: render the simulator state in a Figure window.
- Increment counter: modifies read-only variable
counterto record the number of finished iterations.
Steps 8 to 13 are located in a separate algorithms/student_workspace.m function.
Warning! Step 7 is going to be skipped during the final project evaluation. Your solution must not rely on MoCap data!
You should be able to complete all the assignments witnout modifying the main.m file.
Custom Functions
You are welcome to add as many custom functions in the algorithms folder as you like; however, try to follow the proposed folder structure (e.g., put the Kalman filter-related functions in the kalman_filter folder). You may also arbitrarily modify the content (not header) of the student workspace function (steps 8 to 13 of the simulation loop) and other functions called by it.
Maps and testing
The maps directory contains several maps in the text file format, which are parsed in real-time when the simulation is started. Use reverse engineering to understand the syntax, and create own maps to test your algorithms thoroughly. In general, the syntax includes the definition of the goal position, map dimensions, wall positions, and GNSS-denied polygons. Do not forget to test various start poses as well (including start angle!); this is adjustable via start_position variable (setup.m). For the project evaluation, a comprehensive map comprising both indoor and outdoor areas and GNSS-denied zones will be employed.
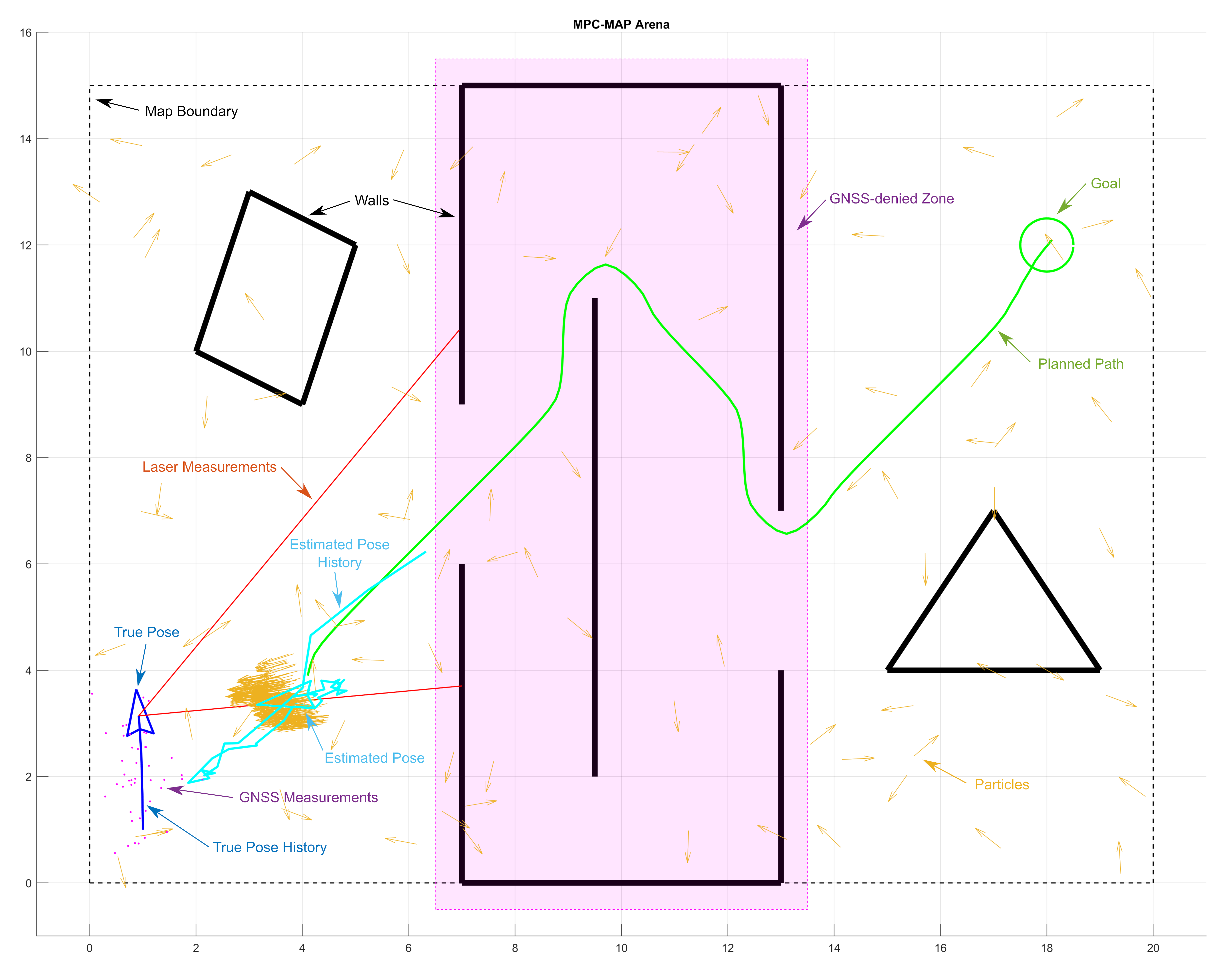
GUI